Search Navigation
Search Models 18028
navigation 1:Navigation
Most Popular Categories
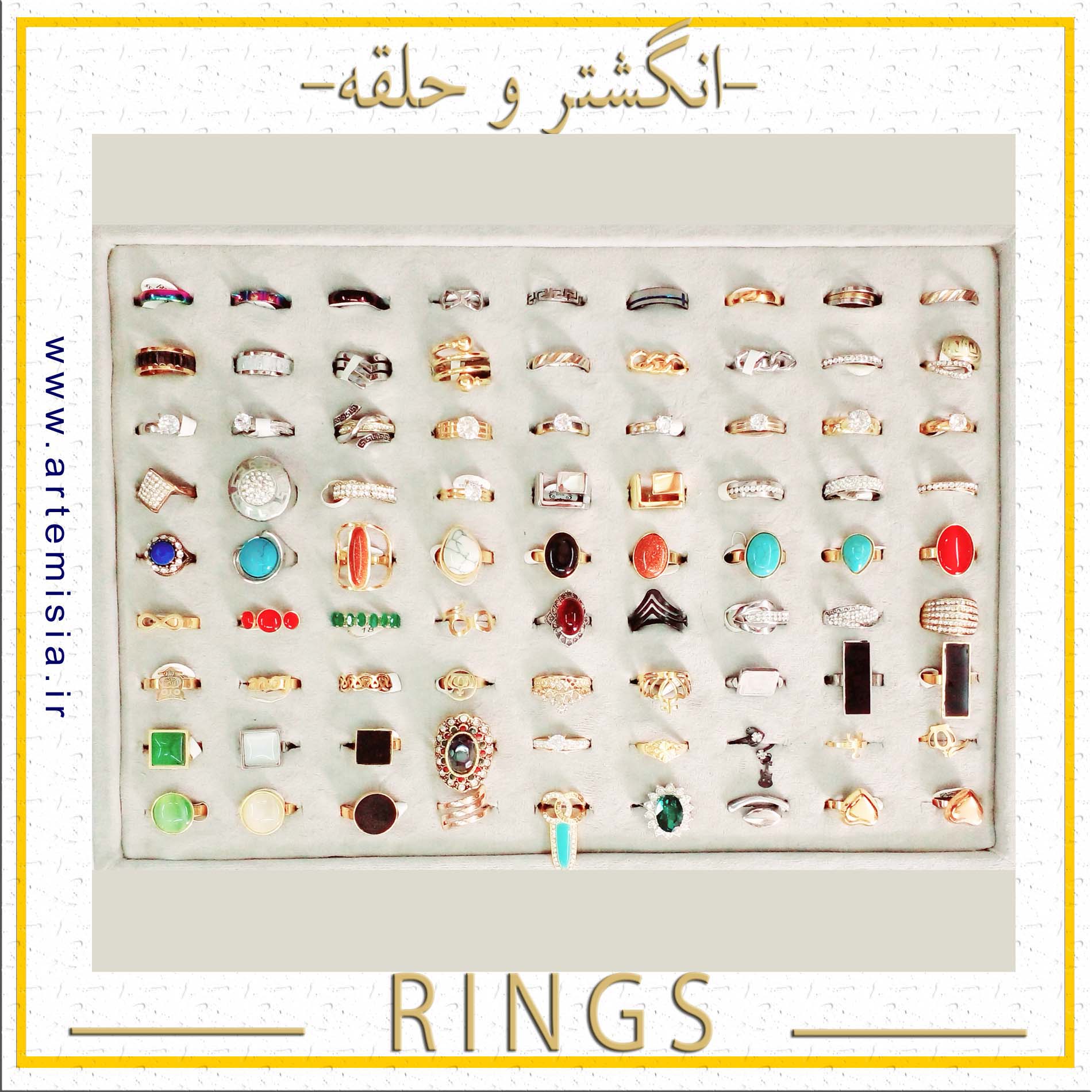
Rings
Steel Hoop,Free Size Ring,English Name Ring,Latin Name Ring,Persian Name Ring,Latin Name Bracelets,English Name Bracelet
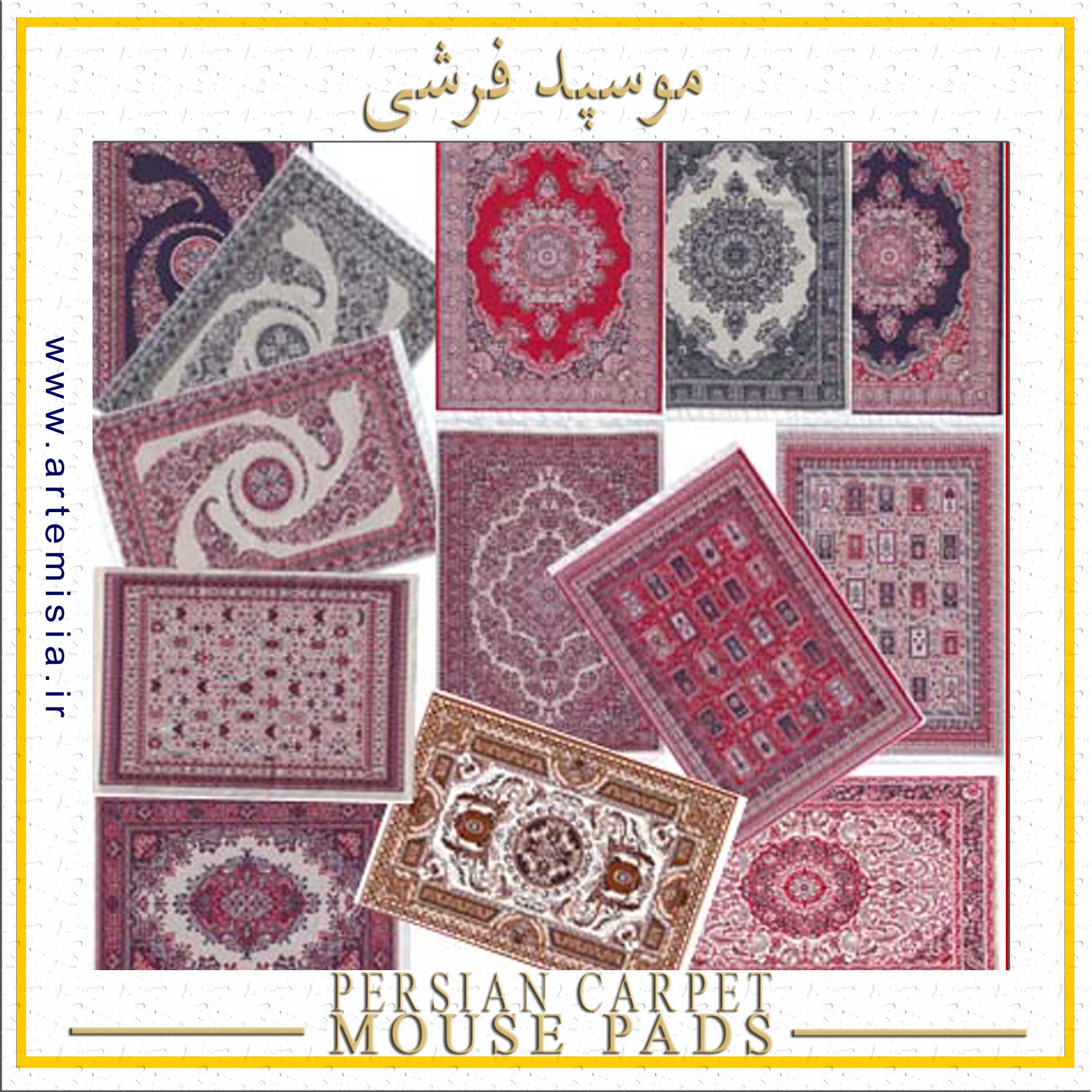
Carpet Mouse Pads
Iran Souvenir,Persian Rug Mouse Pad,Oriental Design Mousepads,Rug Mouse Pads,Persian Carpet Mouse Pads,Carpet Mouse Pad,Persian Carpet Design

Bracelets
Girls Bracelet,Elastic Bracelet,Plated Bracelets,Bracelet,Stone Bracelet,Knot Bracelet,Steel Bracelet

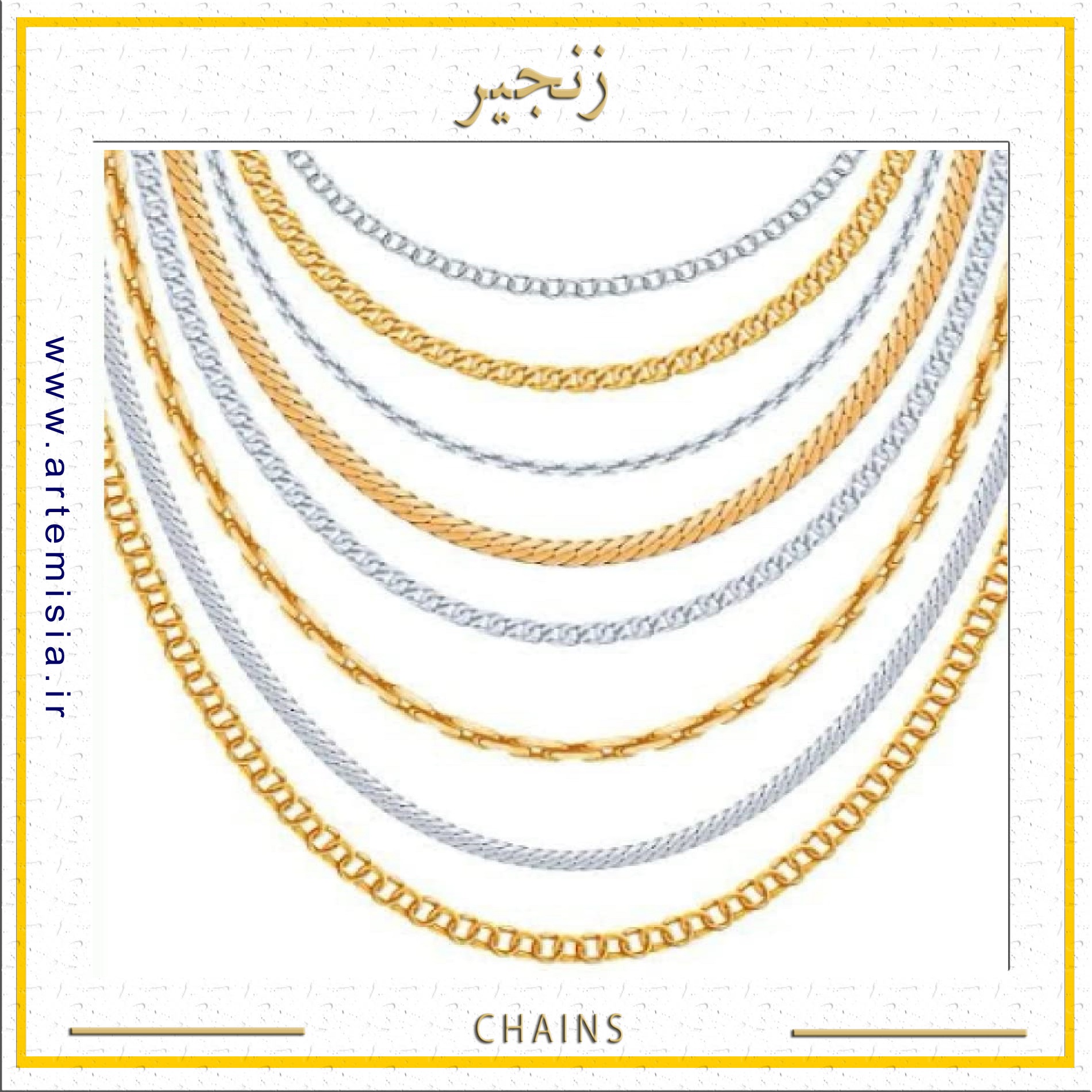
Necklaces
Necklace,Pearl Necklace,Artificial Yosr,Prayer Pendant,Rock Necklace,Resin Necklace,Black Necklace

Jewelry Set
Stainless Steel Half Set,Fixed Color Half Set,Solid Color Necklace,Golden Half Set,Girls Day Gift,Silver Half Set,Epoxy Resin Earrings
Hashtag Cloud
←bag←barrette←Beloved Names←big←black←box←bracelet←Bracelet Charm←Bracelet Charms←Bracelet Pendant←bronze←carpet←Carpet Design Mouse Pad←Carpet Design Mouse Pad Sale←Carpet Mouse-Pad←Carpet Mouse Rug←chain←Charm Pendant←clips←ear←earrings←elastic←English Name Ring←esi←eye←eyecatcher←Favorite Names←Free Size Ring←gold←golden←Golden Puzzle←hairband←Hair Clip←Hair Clips←iran←Iran Design←iranian←Iranian Design Mouse-Mat←Iranian Mousepad←jewelled←Latin Golden←Latin Name Ring←Latin Silver←love←Love Pendant←magic←Mainstream Names←medium←Men's Ring←metal←Metal Charm←mini←Mini Carpet←Most Beautiful Names←Most Common Names←Most Popular Names←Mouse Carpet Rug←mousepad←Mouse Pad Carpet←Mouse-pad Carpet Design←ms←Name Necklace←Name Pendant←Names Pendant←necklace←Necklace Charms←Necklace Pendant←normal←Om Pendant←Oriental Design Mouse Pad←pack←pendant←Pendant Necklace←Persia Carpet Mouse Pad←Persian Carpet Design←Persian Carpet Mouse Pad←persiancarpetmousepads←Persian Golden←Persian Name Ring←Persian Steel←piece←pin←purse←ring←rings←sh←silver←Silver Puzzle←simple←small←Sports Ring←steel←Steel Hoop←Steel Pendant←Steel Ring←stone←tablecloth←terme←termeh←Trendiest NamesAlways SALE Artemis Not Just Moto!
- User Information Confidential
- Iran Shipping Only
- For information on inventory, wholesale & distribution please contact us
SEO Artemisia Search Navigation Sales Marketing
https://danamotor.ir/media/Artemisia_Shop_Iran_Gilan_Rasht.jpg
Link: http://artemisia.ir/artemis.php?langid=1&bejoo=Navigation
https://danamotor.ir/media/Artemisia_Shop_Iran_Gilan_Rasht.jpg
Link: http://artemisia.ir/artemis.php?langid=1&bejoo=Navigation
Contact Info
Artemis Iran
- Artemis Shop
Pamenar Xsection, #560 Galleria Mall Grand Bazaar of Tehran
+9821-55583681-82
Please call before visiting in person
Wholesale & Distribution Phone:+989227489149 - Gilan Branch: Rasht, Pejman St Phone: +989209792294
- E-mail: mimahoda@gmail.com